🤖 KI auf dem Alvik: Dein Roboter lernt!
✨ Das Besondere an diesem Projekt
Künstliche Intelligenz ist überall – in deinem Smartphone, in Sprachassistenten, in selbstfahrenden Autos. Und jetzt auch auf deinem Alvik! In diesem Projekt bringst du deinem Roboter bei, Muster zu lernen und eigenständig auszuführen – genau wie echte KI!
🧠 Was ist Machine Learning überhaupt?
Machine Learning (auf Deutsch: "Maschinelles Lernen") ist ein Teilbereich der Künstlichen Intelligenz. Statt einem Computer jede einzelne Regel einzuprogrammieren, lernt er aus Beispielen!
❌ Normale Programmierung
"Wenn Sensor A den Wert 5 misst, dann fahre 10 cm. Wenn Sensor B den Wert 3 misst, dann drehe um 90°..."
→ Programmierer gibt alle Regeln vor
✅ Machine Learning
"Hier sind 1000 Beispiele von roten Farben. Lerne selbst, was 'Rot' bedeutet und was du dann tun sollst!"
→ Computer lernt aus Beispielen
🎯 Wie funktioniert unser Mini-KI-Roboter?
Dein Alvik-Roboter lernt in diesem Projekt wie eine KI! Er durchläuft die gleichen Phasen wie echte Machine-Learning-Systeme:
Die 4 Phasen des Lernens
TRAININGSPHASE (Lernen)
Du zeigst dem Alvik 5 Farbkarten. Er scannt jede Farbe und speichert sie.
- 🔴 Rot = Vorwärts fahren
- 🟡 Gelb = Rückwärts fahren
- 🟢 Grün = Rechts drehen
- 🔵 Blau = Links drehen
MODELL-ERSTELLUNG (Speichern)
Der Alvik speichert die Farb-Sequenz in seinem "Gedächtnis" (der Variable pattern_memory[]). Das ist wie ein trainiertes KI-Modell!
VALIDIERUNG (Überprüfen)
Du siehst auf dem Display, was der Alvik gelernt hat. Erst wenn du OK drückst, geht's weiter – so wie bei echten KI-Systemen, die erst getestet werden müssen!
INFERENCE (Anwenden)
Jetzt wird's spannend! Der Alvik führt das gelernte Muster komplett selbstständig aus – ohne dass du noch etwas eingeben musst. Das nennt man in der KI "Inference"!
- ChatGPT wurde mit Millionen von Texten trainiert → erkennt Sprachmuster
- Gesichtserkennung wurde mit tausenden Fotos trainiert → erkennt Gesichter
- Dein Alvik wurde mit 5 Farbkarten trainiert → erkennt Farben und führt Bewegungen aus
🔬 Das Geheimnis: Kalibrierte Farberkennung
Das Herzstück dieses Programms ist die Funktion detect_color_calibrated(). Sie arbeitet wie ein neuronales Netz bei Bilderkennung:
| Schritt | Was passiert? | KI-Vergleich |
|---|---|---|
| 1. Daten sammeln | 5 Farbmessungen (RGB) werden gemacht | Wie Kamera-Bilder für Bilderkennung |
| 2. Umwandeln | RGB → HSV (Farbton, Sättigung, Helligkeit) | Feature-Extraction (Merkmale herausfiltern) |
| 3. Durchschnitt | Mittelwert aus 5 Messungen | Noise Reduction (Fehler reduzieren) |
| 4. Klassifizieren | Vergleich mit kalibrierten Bereichen | Classification (In Kategorien einteilen) |
RGB-Werte ändern sich stark bei unterschiedlichem Licht. HSV (Hue-Saturation-Value) ist stabiler:
- H (Hue) = Farbton (0-360°) – "Welche Farbe?"
- S (Saturation) = Sättigung (0-1) – "Wie kräftig?"
- V (Value) = Helligkeit (0-1) – "Wie hell?"
Technische Funktionen und Code-Struktur
Genutzte Alvik-Funktionen
Sensorik:
get_color()undrgb2hsv()– Liest RGB-Farbwerte und konvertiert sie in HSV-Format für zuverlässige Farberkennungget_color_label()– Gibt Farbbezeichnungen zurück (wird durch eigene HSV-Erkennung ersetzt)set_illuminator(True)– Aktiviert die LED-Beleuchtung für konstante Lichtverhältnisse
Bewegung:
move(distance, 'cm', blocking=True)– Fährt geradeaus (Rot/Gelb)rotate(angle, 'deg', blocking=True)– Dreht auf der Stelle (Grün/Blau)
Feedback:
left_led.set_color(r, g, b)/right_led.set_color(r, g, b)– Visuelles Feedback während Erkennungget_touch_ok()– Wartet auf Nutzerbestätigung zum Start
Display (I2C):
ssd1306.SSD1306_I2C()– Initialisiert das OLED-Display über I2C (Pins 11/12)display.text(),display.fill(),display.show()– Textausgabe und Fortschrittsbalken
Code-Struktur (4 Phasen)
- Initialisierung: Display- und Roboter-Setup, Beleuchtung einschalten, Startbildschirm
- Lernphase: Schleife erfasst 5 Farben mit
detect_color_calibrated(), speichert sie inpattern_memory[], zeigt Fortschritt am Display - Bestätigung: Blink-Animation bis OK-Taste gedrückt wird, zeigt gelerntes Muster als Symbolsequenz
- Ausführung: For-Schleife iteriert durch
pattern_memory[]und führt entsprechende Bewegungsbefehle aus, Display zeigt Live-Fortschritt
Kern-Algorithmus: Die Funktion detect_color_calibrated() nimmt 5 HSV-Messungen, bildet Durchschnittswerte und vergleicht diese mit kalibrierten Bereichen (H: Farbton 0-360°, S: Sättigung 0-1, V: Helligkeit 0-1) für präzise Farberkennung.
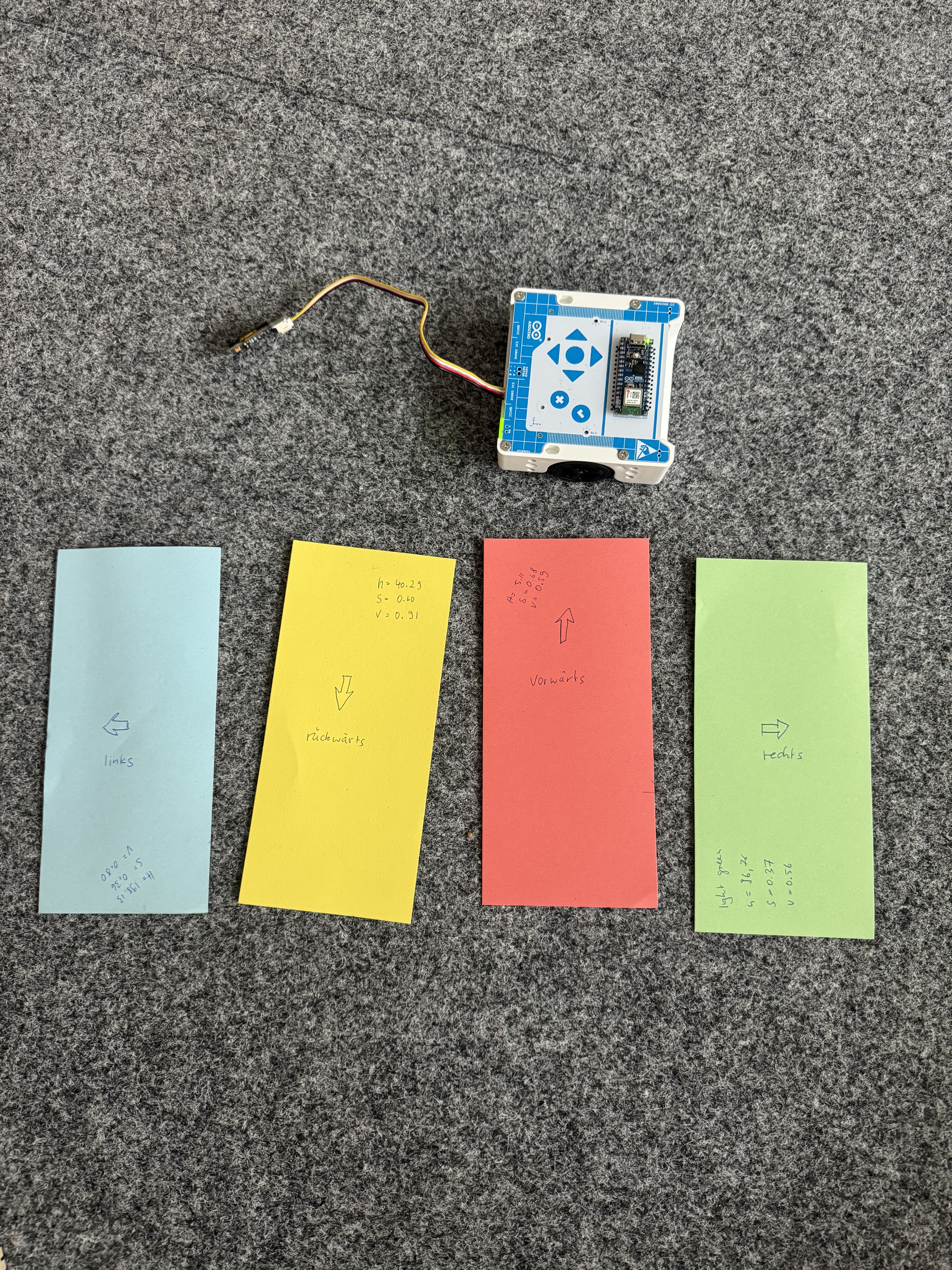
Alvik-Roboter bei der Mustererkennung
Python Code
from machine import Pin, I2C
import ssd1306
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
# ==================== DISPLAY KONFIGURATION ====================
i2c = I2C(sda=Pin(11), scl=Pin(12))
display = ssd1306.SSD1306_I2C(128, 64, i2c)
def display_text(lines, clear=True):
if clear:
display.fill(0)
y = 0
for line in lines:
display.text(line, 0, y, 1)
y += 10
display.show()
def display_progress_bar(current, total, label=""):
display.fill(0)
display.text(label, 0, 0, 1)
bar_width = int((current / total) * 120)
display.rect(4, 20, 120, 15, 1)
display.fill_rect(5, 21, bar_width, 13, 1)
percent = f"{current}/{total}"
x = (128 - len(percent) * 8) // 2
display.text(percent, x, 45, 1)
display.show()
# ==================== PERFEKT KALIBRIERTE FARBERKENNUNG ====================
def detect_color_calibrated(alvik):
"""
Exakte Farberkennung mit ALLEN gemessenen HSV-Werten:
ROT: h=5.11, s=0.68, v=0.59 (hohe Sättigung, mittlere Helligkeit)
GELB: h=40.04, s=0.59, v=0.92 (SEHR hell!)
GRÜN: h=96.76, s=0.37, v=0.56 (niedrige Sättigung, niedrige Helligkeit)
BLAU: h=198.13, s=0.36, v=0.80 (niedrige Sättigung, hohe Helligkeit)
"""
# 5 Messungen für maximale Stabilität
h_values = []
s_values = []
v_values = []
for _ in range(5):
r, g, b = alvik.get_color()
h, s, v = alvik.rgb2hsv(r, g, b)
h_values.append(h)
s_values.append(s)
v_values.append(v)
sleep_ms(30)
# Durchschnittswerte berechnen
h = sum(h_values) / len(h_values)
s = sum(s_values) / len(s_values)
v = sum(v_values) / len(v_values)
# Optional: Debug-Ausgabe (auskommentieren zum Testen)
# print(f"H:{h:.1f} S:{s:.2f} V:{v:.2f}")
# Zu dunkel = keine gültige Farbe
if v < 0.10:
return None
# Zu geringe Sättigung UND zu dunkel = Schwarz/Grau
if s < 0.15 and v < 0.40:
return None
# ===== PRÄZISE FARBERKENNUNG MIT ALLEN PARAMETERN =====
# ROT: h=5.11, s=0.68, v=0.59
# Einzige Farbe mit HOHER Sättigung + mittlerer Helligkeit
if (h < 25 or h > 340) and 0.50 < s < 0.85 and 0.40 < v < 0.75:
return 'RED'
# GELB: h=40.04, s=0.59, v=0.92
# SEHR HELL (v=0.92) unterscheidet es von allen anderen!
elif 28 < h < 52 and 0.40 < s < 0.75 and 0.80 < v:
return 'YELLOW'
# GRÜN: h=96.76, s=0.37, v=0.56
# Niedrige Sättigung + niedrigste Helligkeit
elif 72 < h < 122 and 0.20 < s < 0.55 and 0.40 < v < 0.70:
return 'GREEN'
# BLAU: h=198.13, s=0.36, v=0.80
# Niedrige Sättigung aber HOHE Helligkeit (unterscheidet von Grün!)
elif 173 < h < 223 and 0.20 < s < 0.50 and 0.65 < v < 0.95:
return 'BLUE'
return None
# ==================== FARB-KONFIGURATION ====================
COLOR_ACTIONS = {
'RED': {'name': 'Vorwaerts', 'symbol': '^', 'led': (1, 0, 0)},
'YELLOW': {'name': 'Rueckw.', 'symbol': 'v', 'led': (1, 1, 0)},
'GREEN': {'name': 'Rechts', 'symbol': '>', 'led': (0, 1, 0)},
'BLUE': {'name': 'Links', 'symbol': '<', 'led': (0, 0, 1)}
}
MAX_PATTERN_LENGTH = 5
MOVE_DISTANCE = 15
ROTATION_ANGLE = 90
# ==================== INITIALISIERUNG ====================
alvik = ArduinoAlvik()
alvik.begin()
alvik.set_illuminator(True)
sleep_ms(500)
# Startbildschirm
display_text([
"==================",
" ALVIK KI-DEMO",
"==================",
"",
"Perfekt",
"kalibriert!"
])
sleep_ms(2000)
# LEDs Begrüßung
for _ in range(3):
alvik.left_led.set_color(1, 1, 1)
alvik.right_led.set_color(1, 1, 1)
sleep_ms(300)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
sleep_ms(300)
# ==================== PHASE 1: LERNEN ====================
display_text([
"LERNPHASE",
"----------",
"Zeige Farben:",
"ROT = ^",
"GELB = v",
"GRUEN = >",
"BLAU = <"
])
sleep_ms(3000)
pattern_memory = []
last_color = None
no_color_counter = 0
while len(pattern_memory) < MAX_PATTERN_LENGTH:
display_progress_bar(len(pattern_memory), MAX_PATTERN_LENGTH, "Lerne Farben...")
# Nutze perfekt kalibrierte Farberkennung
current_color = detect_color_calibrated(alvik)
if current_color and current_color != last_color:
pattern_memory.append(current_color)
action = COLOR_ACTIONS[current_color]
# LED-Feedback
alvik.left_led.set_color(*action['led'])
alvik.right_led.set_color(*action['led'])
# Display-Anzeige
display.fill(0)
display.text(f"Farbe {len(pattern_memory)}/{MAX_PATTERN_LENGTH}", 10, 0, 1)
display.text(current_color, 20, 20, 1)
display.text(action['symbol'] * 5, 20, 35, 1)
display.text(action['name'], 15, 50, 1)
display.show()
last_color = current_color
no_color_counter = 0
sleep_ms(1500)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
elif current_color is None:
no_color_counter += 1
if no_color_counter > 15: # 1.5 Sekunden ohne Farbe
last_color = None
no_color_counter = 0
sleep_ms(100)
# Gelerntes Muster anzeigen
display.fill(0)
display.text("Gelernt:", 0, 0, 1)
pattern_str = "".join([COLOR_ACTIONS[c]['symbol'] for c in pattern_memory])
x = (128 - len(pattern_str) * 8) // 2
display.text(pattern_str, x, 28, 1)
display.show()
sleep_ms(2000)
# ==================== PHASE 2: BESTÄTIGUNG ====================
blink_state = True
while not alvik.get_touch_ok():
display.fill(0)
if blink_state:
display.text("Bereit!", 35, 15, 1)
display.text("Druecke OK", 20, 35, 1)
display.show()
blink_state = not blink_state
sleep_ms(500)
# ==================== PHASE 3: AUSFÜHREN ====================
display.fill(0)
display.text("START!", 40, 28, 1)
display.show()
sleep_ms(1000)
for i, color in enumerate(pattern_memory):
action = COLOR_ACTIONS[color]
display.fill(0)
display.text(f"Schritt {i+1}/{len(pattern_memory)}", 10, 0, 1)
done_pattern = "".join([COLOR_ACTIONS[c]['symbol'] for c in pattern_memory[:i+1]])
display.text(done_pattern, 5, 20, 1)
display.text(action['symbol'] * 3, 40, 35, 1)
display.text(action['name'], 20, 50, 1)
display.show()
alvik.left_led.set_color(*action['led'])
alvik.right_led.set_color(*action['led'])
if color == 'RED':
alvik.move(MOVE_DISTANCE, 'cm', blocking=True)
elif color == 'YELLOW':
alvik.move(-MOVE_DISTANCE, 'cm', blocking=True)
elif color == 'GREEN':
alvik.rotate(-ROTATION_ANGLE, 'deg', blocking=True)
elif color == 'BLUE':
alvik.rotate(ROTATION_ANGLE, 'deg', blocking=True)
sleep_ms(300)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
# ==================== ABSCHLUSS ====================
display_text(["", " FERTIG!", "", " Muster", " ausgefuehrt!", "", " :-)"])
for _ in range(5):
alvik.left_led.set_color(0, 1, 0)
alvik.right_led.set_color(0, 1, 0)
sleep_ms(200)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
sleep_ms(200)
alvik.brake()
alvik.set_illuminator(False)
sleep_ms(5000)
display.fill(0)
display.show()
⚙️ Kalibrierung: Jeden Alvik individuell anpassen
Das liegt daran, dass jeder Farbsensor kleine Fertigungsunterschiede hat. Farben werden dadurch mit leicht anderen HSV-Werten erkannt. Die Lösung: Du misst die Referenzwerte für deinen Alvik neu aus und passt die Bereiche in der Funktion detect_color_calibrated() entsprechend an.
So gehst du vor
- Lade das Kalibrierungs-Programm (unten) auf deinen Alvik
- Halte nacheinander jede Farbkarte (Rot, Gelb, Grün, Blau) unter den Sensor
- Notiere dir die angezeigten H-, S- und V-Werte für jede Farbe
- Passe die Bereiche in
detect_color_calibrated()an deine gemessenen Werte an
Kalibrierungs-Programm
Dieses Programm misst kontinuierlich die HSV-Werte und gibt sie in der Konsole aus. Halte einfach eine Farbkarte unter den Sensor und lies die Werte ab:
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
alvik = ArduinoAlvik()
alvik.begin()
alvik.set_illuminator(True)
sleep_ms(500)
print("Halte jetzt eine Farbkarte unter den Sensor...")
print("=" * 50)
while True:
h_values, s_values, v_values = [], [], []
for _ in range(5):
r, g, b = alvik.get_color()
h, s, v = alvik.rgb2hsv(r, g, b)
h_values.append(h)
s_values.append(s)
v_values.append(v)
sleep_ms(30)
h = sum(h_values) / len(h_values)
s = sum(s_values) / len(s_values)
v = sum(v_values) / len(v_values)
print(f"H={h:6.1f} S={s:.2f} V={v:.2f}")
sleep_ms(500)Beispiel: Werte anpassen
Angenommen, dein Alvik misst für Rot den Wert H=12.3, S=0.71, V=0.55 statt des kalibrierten H=5.1. Dann passt du den Bereich im Hauptprogramm so an:
# Vorher (Original-Kalibrierung):
if (h < 25 or h > 340) and 0.50 < s < 0.85 and 0.40 < v < 0.75:
return 'RED'
# Nachher (an deinen Alvik angepasst):
# Dein gemessener Wert: H=12.3 → Bereich großzügig um diesen Wert legen
if (h < 30 or h > 340) and 0.50 < s < 0.85 and 0.35 < v < 0.75:
return 'RED'🚀 Deine eigenen KI-Projekte mit dem Alvik
Jetzt wo du verstehst, wie Machine Learning funktioniert, kannst du eigene coole KI-Projekte umsetzen! Hier sind inspirierende Ideen:
🎮 Gesten-Steuerung
Trainiere den Alvik, verschiedene Hand-Gesten zu erkennen! Nutze den Abstandssensor und lass ihn lernen: Schnelle Bewegung = Vorwärts, Langsame = Stop, Auf-Ab = Drehen
🎵 Ton-Erkennung
Lass den Alvik auf Klatschen oder Pfeifen reagieren! Messe mit dem Mikrofon verschiedene Töne und lerne: 1x Klatschen = Start, 2x = Stop, Pfeifen = Drehen
🗺️ Labyrinth-Löser
Der Alvik lernt, wie man Labyrinthe löst! Speichere erfolgreiche Wege und lass ihn beim nächsten Mal den gelernten Weg fahren – wie ein GPS!
🌡️ Umwelt-Assistent
Mit BME680-Sensor: Lerne verschiedene Raum-"Zustände" (zu warm, zu kalt, gute Luft, schlechte Luft) und lass den Alvik entsprechend reagieren!
🎨 Künstler-Roboter
Lass den Alvik Muster auf Papier zeichnen! Lerne ihm verschiedene Bewegungssequenzen bei und er "malt" geometrische Formen automatisch
🏁 Rennstrecken-Lernen
Der Alvik fährt eine Strecke ab und lernt sie! Beim zweiten Durchgang fährt er schneller, weil er weiß wo die Kurven sind – wie Rennfahrer!
💭 Denk weiter: Was ist mit echter KI möglich?
Du hast jetzt die Grundlagen verstanden! In der echten KI-Welt werden ähnliche Prinzipien verwendet – nur viel komplexer:
- 🚗 Selbstfahrende Autos lernen aus Millionen Kilometer Straßenfahrten
- 🏥 Medizinische KI erkennt Krankheiten auf Röntgenbildern – trainiert mit tausenden Beispielen
- ♟️ Schach-Computer lernen Strategien durch Millionen gespielte Partien
- 🎬 Netflix & YouTube lernen deine Vorlieben und empfehlen passende Inhalte
- 🌍 Klimamodelle lernen aus historischen Wetterdaten, um die Zukunft vorherzusagen
Mit dem Alvik hast du den ersten Schritt gemacht – wer weiß, vielleicht entwickelst du eines Tages die nächste bahnbrechende KI! 🚀
Challenge: Machine Learning verstehen
Teste dein Wissen über KI und Machine Learning!
📝 Quiz
Was ist der Hauptunterschied zwischen normaler Programmierung und Machine Learning?
💡 Experimentier-Challenge
Aufgabe: Überlege dir ein eigenes Muster mit den 4 Farben und lass den Alvik es lernen!
- Erstelle ein Muster, das den Alvik im Kreis fahren lässt
- Lass ihn ein "L" oder "T" fahren
- Kombiniere viele Vorwärts-Bewegungen mit nur einer Drehung
- Was passiert mit 5x Rot? Probiere es aus!
✅ Selbsttest
Hake ab, was du gelernt hast: